نویسنده : www.BartarFile.ir
تاریخ : جمعه 30 خرداد 1400
پروژه حل معادلات لاپلاس برای مش بندی سه و هشت گرهی(پروژه درس روش اجزای محدود)، مشتمل بر 24 صفحه، تایپ شده، با فرمت pdf، به همراه روابط ریاضی و 4 فایل پیوست با فرمت Excel، به ترتیب زیر گردآوری شده است:
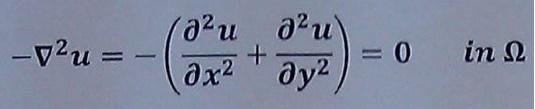
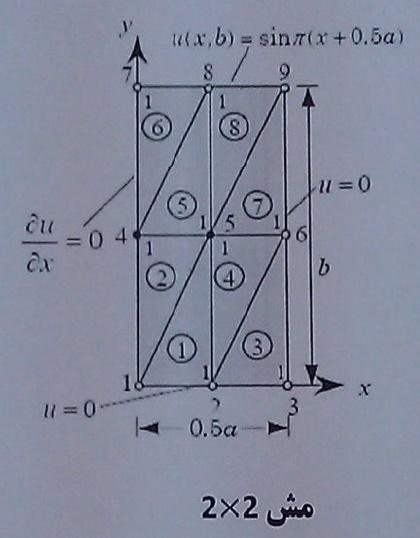
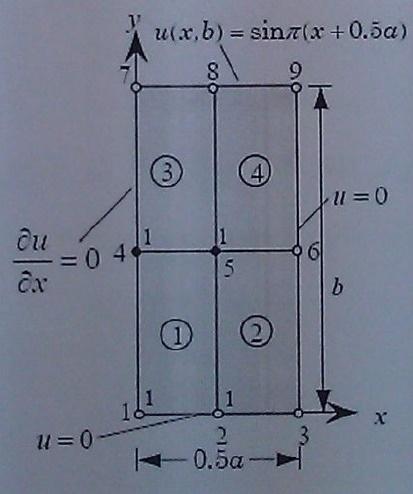
مطلوب است حل معادله لاپلاس بر روی محیط نشان داده شده در شکل زیر با توجه به مش بندی های ارائه شده در بندهای زیر:
الف) مش بندی مثلثی سه گرهی نشان داده شده در شکل زیر:
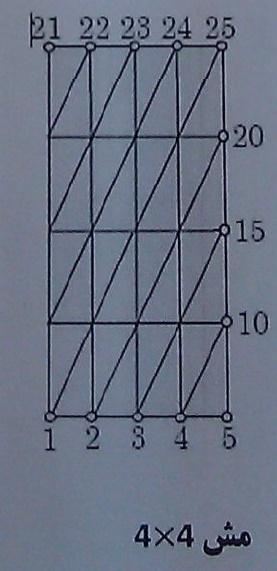
ب) مش بندی مثلثی سه گرهی نشان داده شده در شکل زیر: (فرض شود که شرایط مرزی در این بند مشابه با شرایط مرزی نشان داده شده در بند الف باشد)
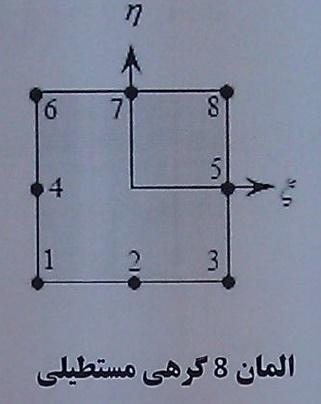
ج) مطلوب است استخراج ماتریس سختی و بردارهای نیروی گرهی برای المان هشت گرهی مستطیلی به شکل زیر:
سپس مطلوب است حل معادله لاپلاس ارائه شده در بندهای قبل با استفاده از المان مستطیل هشت گرهی با استفاده از مش بندی زیر:
د) مقایسه نتایج ارائه شده در بندهای قبل برای مقادیر u در گره های مختلف. لازم به ذکر است که برای حل مساله فوق می بایست از کدنویسی کامپیوتری استفاده شود...
جهت دانلود پروژه حل معادلات لاپلاس برای مش بندی سه و هشت گرهی (پروژه درس روش اجزاء محدود) بر لینک زیر کلیک نمایید.
نویسنده : www.BartarFile.ir
تاریخ : جمعه 29 خرداد 1400
روش اجزاء محدود، روشی عددی برای یافتن حل تقریبی بسیاری از مسائل مهندسی است. هرچند این روش برای اولین بار جهت تحلیل تنش در سازه هواپیما به کار گرفته شد، لیکن کاربرد آن در بسیاری از مسائل مکانیک جامدات، مکانیک سیالات و علوم به سرعت رو به گسترش نهاد. در زمینه مهندسی راه و ساختمان نیز این روش تحلیل سازه های بسیار پیچیده و طرح بهینه آنها را به طور موثر و اقتصادی ممکن می سازد.
یک المان، یک جزء از یک محیط پیوسته جزء بندی شده است. ابعاد آن محدود است ولی بینهایت کوچک نیست و معمولا هندسه آن ساده تر از هندسه محیط پیوسته است. روش اجزاء محدود ما را قادر می سازد که یک مسئله با بینهایت درجه آزادی را به یک مسئله با درجات آزادی محدود تبدیل نماییم تا بدین وسیله حل آن ساده تر شود. هرچند که کاربرد اصلی این روش در خصوص مسائل مکانیک جامدات است، لیکن از آن می توان در سایر زمینه هایی که دارای مدل ریاضی مشابه می باشند نیز استفاده نمود. در واقع اساس حل اجزاء محدود یک مسئله مهندسی این است که مجموعه ای از معادلات جبری حاکم، ایجاد شده و حل می شود و تنها با استفاده از کامپیوتر بود که این فرایند توانست موثر بودن خود را نشان دهد و قابلیت کاربرد عمومی پیدا کند. این دو خاصیت، موثر بودن و کاربرد عمومی در تحلیل مهندسی لازمه ذاتی در تئوری به کار رفته می باشند و برای محاسبات عملی به درجه بالایی توسعه یافته اند، به گونه ای که روش های اجزاء محدود در عرصه مهندسی محبوبیت زیادی پیدا کرده است.
جزوه آموزش روش های اجزاء محدود مقدماتی پروفسور عیسی سلاجقه، جزوه ای مفید و کاربردی از درس اجزاء محدود مقدماتی است. این جزوه مشتمل بر 7 فصل، 220 صفحه، با فرمت pdf، به زبان فارسی، همراه با ذکر نکات، فرمول های مهم و کاربردی و همچنین حل مثال های متعدد به ترتیب زیر گردآوری شده است:
فصل 1: المان های مثلثی دوبعدی
المان مثلث سه گرهی CST
انتقال بار در المان CST
مشخصات المان CST در برنامه ABAQUS
مثال اول - المان CST
مثال دوم - المان CST
مثال سوم - المان CST
تمرین - المان CST
المان بندی در اجزاء محدود
تراکم استاتیکی
المان مثلث شش گرهی LST
المان مثلث ده گرهی QST
مشخصات المان LST در برنامه ABAQUS
مثال - المان LST
انتقال بار در المان LST
تمرین - المان LST
جدول مشخصات المان های مثلثی دوبعدی
فصل 2: المان های مربعی دوبعدی
مثال اول - المان مربع چهار گرهی (حل غیر ایزوپارامتریک)
روش ایزوپارامتریک
مشخصات المان چهار گرهی در برنامه ABAQUS
مثال دوم - المان چهار گرهی
مثال سوم - المان چهار گرهی
انتقال تنش ها از نقاط گوس به نقاط اصلی در المان چهار گرهی
مثال چهارم - المان چهار گرهی
انتقال بار در المان چهار گرهی
تمرین - المان چهار گرهی
مشخصات المان هشت گرهی در برنامه ABAQUS
تمرین - المان هشت گرهی
المان دوازده گرهی
جدول مشخصات المان های مربعی دوبعدی
فصل 3: المان های هرمی سه بعدی
المان سه بعدی هرم
انتقال بار در المان سه بعدی هرم
مشخصات المان سه بعدی هرم در برنامه ABAQUS
مثال - المان سه بعدی هرم
مشخصات المان سه بعدی ده گرهی در برنامه ABAQUS
جدول مشخصات المان های هرمی سه بعدی
فصل 4: المان های مکعبی سه بعدی
المان هشت گرهی سه بعدی
انتقال تنش ها از نقاط گوس به نقاط اصلی در المان هشت گرهی
مشخصات المان هشت گرهی در برنامه ABAQUS
المان بیست گرهی سه بعدی
انتقال تنش ها از نقاط گوس به نقاط اصلی در المان بیست گرهی (گوس 14 نقطه ای)
مشخصات المان سه بعدی بیست گرهی در برنامه ANSYS
مشخصات المان سه بعدی بیست گرهی در برنامه ABAQUS
المان سی و دو گرهی سه بعدی
جدول مشخصات المان های مکعبی سه بعدی
فصل 5: المان های خطی یک بعدی
المان خرپا (روش ماتریسی)
مثال - المان خرپا - حل به روش ماتریسی
تمرین - المان خرپا
المان تیر و قاب (روش ماتریسی)
مثال - المان تیر - حل به روش ماتریسی
تمرین - المان تیر
مثال - المان قاب - حل به روش ماتریسی
تمرین - المان قاب
مثال - المان خرپا و المان CST
المان خرپا (روش اجزاء محدود)
مشخصات المان خرپا در برنامه ABAQUS
مثال اول - المان خرپا - حل به روش اجزاء محدود
مثال دوم - المان خرپا - حل به روش اجزاء محدود
المان تیر و قاب ( روش اجزاء محدود)
مشخصات المان قاب در برنامه ABAQUS
المان شبکه (روش اجزاء محدود)
روش باقیمانده های وزنی (گالرکین)
جدول مشخصات المان های خطی یک بعدی
فصل 6: ورق ها
اثبات رابطه خمشی حاکم بر ورق ها
ورق چهار ضلعی منظم
بررسی سازگاری المان ها در ورق ها
المان های مثلثی شکل
تحلیل ورق های خمشی با منظور نمودن اثر برش
ورق چهار گرهی ایزوپارامتریک
ورق هشت گرهی ایزوپارامتریک
فصل 7: نرم افزار آباکوس (ABAQUS)
جهت دانلود جزوه آموزش روش های اجزاء محدودمقدماتی پروفسور عیسی سلاجقه بر لینک زیر کلیک نمایید.
نویسنده : www.BartarFile.ir
تاریخ : جمعه 22 خرداد 1400
اگرچه نام عناصر محدود اخيرا به اين روش اطلاق گرديده است، اما اين مفهوم چندين قرن پيش نيز مورد استفاده قرار گرفته است. براي مثال رياضي دانان قديمي محيط دايره را با تقريب آن به يك چند ضلعي (محاطي يا محيطي) بدست مي آوردند. بر حسب نامگذاري امروزي هر ضلع اين چند ضلعي را مي توان يك المان محدود ناميد. با در نظر گرفتن چند ضلعي هاي تقريبي به صورت محاطي و محيطي مي توان به ترتيب يك حد پايين يا يك حد بالا براي مقدار كامل (Exact) محيط به دست آورد. مشخص است كه با افزايش اضلاع چند ضلعي، دقت جواب ها (Accuracy) افزايش يافته و مقادير تقريبي به مقدار كامل محيط همگرا مي شوند ( Convergence). روش عناصر محدودي كه به صورت شناخته شده امروزي است، در سال 1956 به وسيله Clough، Turner، Top و Martin در مقاله مشهور زير ارائه شده است:
“Stiffness and Deflection Analysis of Complex Structures”, Journal of Aeronautical Sciences, 23, 805-825 (1956).
اين تحقیق كاربرد عناصر محدود ساده (ميله هاي مفصل شده و ورق مثلثي) براي تحليل سازه هواپيما را نشان مي دهد و به عنوان يكي از پيشرفت هاي كليدي در توسعه روش عناصر محدود در نظر گرفته مي شود. همراه با توسعه كامپيوترهاي ديجيتالي با سرعت هاي بالا، كاربرد روش عناصر محدود هم با نرخ فزاينده اي پيشرفت نمود. بعد از اينكه روابط عناصر محدود در حالت استاتيكي خطي توسعه يافت، كاربرد روش عناصر محدود در زمينه هاي ديگر نيز ادامه يافت. براي مثال مي توان زمينه هايي مانند پاسخ ديناميكي و ارتعاشي، كمانشي، غيرخطي هندسي و مادي، اثرات حرارتي، اندركنش سازه و سيال، اندركنش سازه و اكوستيك، شكست، مواد مركب لايه اي، انتشار موج، ديناميك سازه هاي فضايي و هواپيما را نام برد...
جزوه آموزش مقدماتی تا پیشرفته روش های عناصر محدود غیر خطیمجموعه آموزشی کامل و بی نظیر از درس روش اجزای محدود غیر خطی مقطع کارشناسی ارشد است. این مجموعه مشتمل بر 2 بخش، در 9 فصل، به زبان فارسی، با فرمت powerpoint، همراه با نکات و روابط مهم ریاضی به ترتیب زیر گردآوری شده است:
بخش 1: روش عناصر محدود غیر خطی 1
فصل 1: مقدمه ای بر روش عناصر محدود
تاريخچه روش عناصر محدود
مدل هاي رياضي و روش عناصر محدود
حوزه هاي كاربرد روش عناصر محدود
فرآيند تحليل عناصر محدود
ايده بنيادي روش عناصر محدود و ارتباط آن با تحليل ماتريسي سازه های اسکلتی
بسته هاي نرم افزاري عناصر محدود و نحوه توسعه و حوزه كاركردي آنها
فرض های اساسی در روش عناصر محدود
روش سختی در تحلیل عناصر محدود
تبدیلات دورانی مختصات
فصل 2: مباني رياضي روش عناصر محدود
مدل هاي رياضي و روش عناصر محدود
روش هاي حل مدل هاي رياضي گسسته سيستم
روش هاي حل مدل هاي رياضي پيوسته سيستم
روش Ritz در حل معادلات ديفرانسيل
روش Galerkin در حل معادلات ديفرانسيل
اصل تغيير مكان هاي مجازي و رابطه آن با روش وردشي
فصل 3: فرمول بندي روش عناصر محدود در تحليل خطي
نحوه استخراج معادلات روش عناصر محدود
درجات آزادي محلي عنصري و درجات آزادي كلي سازه اي
اعمال شرایط مرزی
خواص ماتریس های سختی
مدل هاي مختصات تعميم يافته
عناصر مختلف و ويژگي هاي آنها
همگرايي در تحليل عناصر محدود
فصل 4: فرمول بندي عناصر محدود ايزو پارامتريك
فرمول بندي عناصر محدود ايزوپارامتريك محيط پيوسته
توابع درون يابي
مرتبه هاي مناسب انتگرال گيري عددي
شرايط همگرايي در عناصر محدود ايزوپارامتريك محيط پيوسته
فرمول بندي عناصر محدود ايزوپارامتريك سازه اي
عناصر انتقالي
فصل 5: بررسی پایداری سازه ها با استفاده از تحلیل غیرخطی عناصر محدود
مقدمه
مساله اساسی در تحلیل غیرخطی
روش بنیادی در تحلیل غیرخطی
فرمول بندی عمومی تحلیل غیرخطی محیط پیوسته
فرمول بندی لاگرانژی کلی (Total Lagrangian Formulation) و لاگرانژی به هنگام شده (Updated Lagrangian Formulation) مکانیک محیط پیوسته در تحلیل غیر خطی
فرمول بندی عمومی تحلیل غیرخطی عناصر محدود
تحلیل پایداری سازه ها با استفاده از تحلیل غیرخطی عناصر محدود
بخش 2: روش عناصر محدود غیر خطی 2
فصل 1: تحليل خطی عناصر محدود صفحات و پوسته ها
مبانی روش عناصر محدود
دو نظريه در مورد خمش صفحات
استخراج معادله ديفرانسيل حاکم بر خمش صفحه
تحليل عناصر محدود خمش صفحات با استفاده از روش مختصات تعميم يافته بر مبنای نظريه Kirchhoff
تحليل عناصر محدود خمش صفحات با استفاده از عناصر ايزوپارامتريک بر مبنای نظريه Reissner/Mindlin
فرمول بندی آميخته
تحليل عناصر محدود خمش صفحات با استفاده از فرمول بندی آميخته
تحليل عناصر محدود پوسته ها
فصل 2: تحليل غیرخطی عناصر محدود
فرمول بندی عمومی تحلیل غیرخطی محیط پیوسته
فرمول بندی لاگرانژی کلی(Total Lagrangian Formulation) و لاگرانژی به هنگام شده (Updated Lagrangian Formulation) مکانیک محیط پیوسته در تحلیل غیر خطی
فرمول بندی عمومی تحلیل غیرخطی عناصر محدود پیوسته
فرمول بندی تحلیل غیرخطی عناصر محدود سازه ای
کاربرد روابط مشخصه (Constitutive Relations)
تحلیل غیرخطی صرف مصالح ( تحلیل الاستوپلاستیک با شرط تغییرمکان ها و دوران های کوچک، کرنش های کوچک غیرارتجاعی) - نوع مصالح: Von Misses- سخت شدگی آمیخته
تحليل الاستو پلاستيك كرنش هاي بزرگ
فصل 3: حل معادلات غیرخطی
تحلیل ایستایی
روش های Newton-Raphson
روش BFG
روش های نیرو - تغییرمکان - قید
معیارهای همگرايي
تحلیل دینامیکی
حل معادلات تعادل در تحليل ديناميکی
روش هاي انتگرال گيري مستقيم
انتگرال گيري صريح
انتگرال گيري ضمني
حل با استفاده از روش جمع آثار مدها
برخي ملاحظات عملي
فصل 4: محاسبات خطا و روش هاي ايجاد شبکه با خطاي يکنواخت
همگرايي نتايج تحليل
حل عناصر محدود همگراي يكنوا
نرخ همگرايي
محاسبة تنشها و ارزيابي خطا
جهت دانلود جزوه آموزش مقدماتی تا پیشرفته روش های عناصر محدود غیر خطی، بر لینک زیر کلیک نمایید.
نویسنده : www.BartarFile.ir
تاریخ : جمعه 23 خرداد 1400
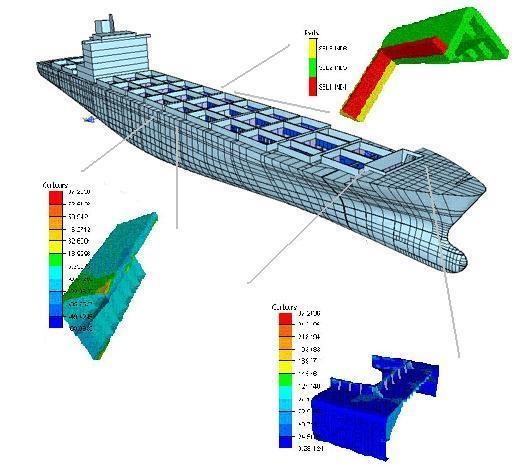
امروزه روش های عناصر محدود به طور وسیعی در تحلیل مهندسی مورد استفاده قرار می گیرند و انتظار می رود که این استفاده در سال های آینده به طور قابل توجهی افزایش یابد. این روش ها به گستردگی در تحلیل جامدات، سازه ها، انتقال حرارت,سیالات مورد استفاده قرار می گیرند و در حقیقت روش های عناصر محدود، تقریبا در تمام زمینه های تحلیل مهندسی قابل استفاده می باشند. گسترش روش های عناصر محدود برای حل مسائل علمی مهندسی با ورود کامپیوتر آغاز گشت. در واقع اساس حل عناصر محدود یک مسئله مهندسی این است که مجموعه ای از معادلات جبری حاکم، ایجاد شده و حل می شود و تنها با استفاده از کامپیوتر بود که این فرآیند توانست موثر بودن خود را نشان دهد و قابلیت کاربرد عمومی پیدا کند. این دو خاصیت، موثر بودن و کاربرد عمومی در تحلیل مهندسی لازمه ذاتی در تئوری به کار رفته می باشند و برای محاسبات عملی به درجه بالایی توسعه یافته اند، به گونه ای که روش های عناصر محدود در عرصه مهندسی خواهان زیادی پیدا کرده است...
کتاب روش های اجزای محدود،مشتمل بر 637 صفحه، در 5 فصل، با فرمت PDF، به زبان فارسی، همراه با روابط مهم ریاضی و نکات مهم تحلیل مهندسی به ترتیب زیر گردآوری شده است:
فصل 1: مقدمه ای بر کاربرد روش های عناصر محدود
فصل 2: بردارها،ماتریس ها,تانسورها
فصل 3: برخی مفاهیم بنیادی تحلیل مهندسی و مقدمه ای بر روش عناصر محدود
فصل 4: فرمول بندی روش عناصر محدود، تحلیل خطی در مکانیک جامدات و سازه ای
فصل 5: فرمول بندی و محاسبه ماتریس های عناصر محدود تک پارامتری
نویسنده : www.BartarFile.ir
تاریخ : دو شنبه 13 ارديبهشت 1400
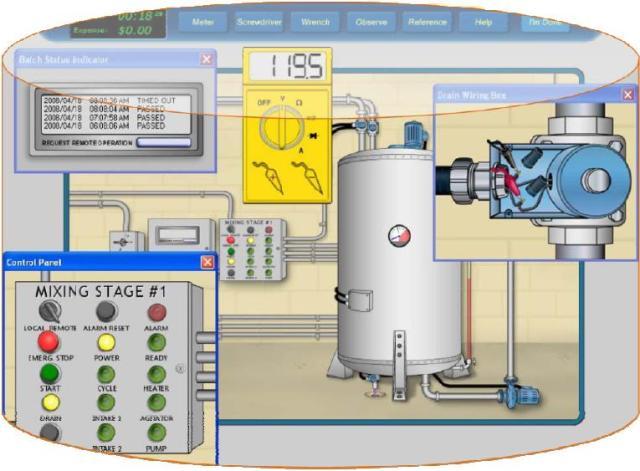
پیشرفت دانش و تکنولوژی سبب شده است که فرآیندهای تولید، پیچیده و دقیق تر شوند و در نتیجه کنترل آنها سخت تر و پیچیده تر شده است. به طوری که سیستم های کنترل سنتی مانند سیستم های رله ای و سیستم های مبتنی بر مدارهای منطقی قادر نیستند نیازهای صنایع امروزی را برآورده سازند. همچنین در سیستم های کنترل سنتی تغییر دستور العمل های کنترل و یا گسترش آن که لازمه یک صنعت پویاست مستلزم انجام تغییرات زیاد در سخت افزار و صرف هزینه بالاست. در سیستم های کنترل صنعتی، سنسورها با توجه به نیاز صنایع پیشرفته ابداع گردیده و تولید شده اند. سنسورها در سیستم های صنعتی بیشتر عملکرد آن به صورت نرم افزاری تعیین می شود و به این علت یک سنسور یا مجموعه ای از سنسورها را می توان با کاربردهای مختلف منطبق نمود و استفاده کرد...
جزوه آموزشی کنترل صنعتی (Industrial Control)،جزوه ای مفید و کاربردی از درس کنترل صنعتی دانشکده فنی تبریز است. این جزوه مشتمل بر 105 صفحه، با فرمت pdf، به زبان فارسی، همراه با ذکر نکات و فرمول های مهم و کاربردی به ترتیب زیر گردآوری شده است:
نویسنده : www.BartarFile.ir
تاریخ : دو شنبه 13 ارديبهشت 1400
در حال حاضر، بررسی ابعاد مختلف تحقیقات روباتیک توسط متخصصان زمینه های گوناگون انجام می پذیرد. معمولا نمی توان فردی را پیدا کرد که بر کل زمینه رباتیک مسلط باشد. از این رو این رشته به رشتههای فرعی تقسیم شده است. به طور مجرد میتوان رباتیک را به چهار رشته فرعی اعمال مکانیکی، انتقال و حرکت، بینایی کامپیوتر و هوش مصنوعی تقسیم کرد. در این کتاب رشته فرعی علم و مهندسی اعمال مکانیکی معرفی میشود. مبانی این رشته فرعی روباتیکی در چندین زمینه کلاسیک مختلف یافت میشود که اصلی ترین آنها مکانیک، نظریه کنترل و علوم کامپیوتر است.
کتاب مکانیک و کنترل در رباتیک (Mechanics and Control in Robotics)، در این کتاب فصلهای ۱ تا ۸ عنوانهایی از مهندسی مکانیک و ریاضیات، فصلهای ۹ تا ۱۱ موضوعاتی در نظریه کنترل و فصلهای ۱۲ تا ۱۳ مطالبی در علوم کامپیوتری را در بر میگیرند. به علاوه، در این کتاب بر جنبههای محاسباتی مسائل تاکید شده است و در پایان فصلهایی که بیشتر درباره مکانیک بحث کرده اند، بخشی کوتاه ویژه مسائل محاسباتی در نظر گرفته شده است. این کتاب مشتمل بر 570 صفحه، در 13 فصل، به زبان فارسی، همراه با تصاویر به ترتیب زیر گردآوری شده است:
فصل اول: مقدمه
زمینه
مکانیک و کنترل بازوهای مکانیکی ماهر
نمادگذاری
فصل دوم :توصیف ها و تبدیل های فضایی کلی
مقدمه
توصیف ها: مکان ها، جهت گیری ها و چهار چوب ها
نگاشت ها: تغییر دادن توصیف ها از چهارچوبی به چهارچوب دیگر
عملگرها: انتقال ها، دوران ها و تبدیل های کلی
خلاصه تعبیرها
عملیات ریاضی در تبدیل کلی
معادله های تبدیل
مطالبی دیگر درباره نمایش جهت گیری
تبدیل بردارهای آزاد
ملاحظات محاسباتی
فصل سوم: سینماتیک بازوهای مکانیکی ماهر
مقدمه
توصیف رابط
توصیف اتصال رابط
قرارداد برای اتصال چهارچوب ها به رابط ها
سینماتیک بازوهای مکانیکی ماهر
فضای کاراندازی، فضای مفصلی و فضای دکارتی
مثال ها: سینماتیک دو روبات صنعتی
چهارچوب های با نام های استاندارد
ابزار کجاست؟
ملاحظات محاسباتی
فصل چهارم: سینماتیک وارون بازوهای مکانیکی ماهر
مقدمه
حل پذیر بودن
نمادگذاری زیر فضای بازوی مکانیکی ماهر در حالت 6 >n
راه حل جبری در مقابل راه حل هندسی
راه حل جبری از طریق تبدیل به چند جمله ای
روش حل پایپر برای سه محور متقاطع در یک نقطه
مثال هایی از سینماتیک وارون بازوهای مکانیکی ماهر
چهارچوب های استاندارد
استفاده از زیر برنامه SOLVE برای بازو های مکانیکی ماهر
دقت و تکرارپذیری
ملاحظات محاسباتی
فصل پنجم: ژاکوبی ها، سرعت ها و نیروهای استاتیکی
مقدمه
نمادگذاری برای مکان و جهت گیری متغیر با زبان
سرعت خطی و دورانی اجسام صلب
مطالبی بیشتر درباره سرعت زاویه ای
حرکت رابط های روبات
چگونگی اشاعه سرعت از رابطی به رابط دیگر
ژاکوبی ها
حالت های تکین
نیروهای استاتیکی در بازوهای مکانیکی ماهر
ژاکوبی ها در حوزه نیرو
تبدیل دکارتی سرعت ها و نیروهای استاتیکی
فصل ششم: دینامیک بازوهای مکانیکی ماهر
مقدمه
شتاب جسم صلب
توزیع جرم
معادله نیوتن معادله اویلر
محاسبات دینامیکی تکراری نیوتن اویلر
معادله های تکراری و معادله های به شکل بسته
مثالی از معادله های دینامیکی بسته
ساختار معادله های دینامیکی بازوهای مکانیکی ماهر
روش لاگرانژ در به دست آوردن معادله های دینامیکی بازوهای مکانیکی
بدست آوردن معادله های دینامیکی بازوهای مکانیکی در فضای دکارتی
شمول اثرات جسم غیر صلب
شبیه سازی دینامیکی
ملاحظات محاسباتی
فصل هفتم: تولید مسیر
مقدمه
ملاحظات کلی درباره توصیف و تولید مسیر
روش های فضای مفصلی
روش های فضای دکارتی
مشکلات هندسی مسیرهای دکارتی
تولید مسیر در هنگام اجرای برنامه کامپیوتری
توصیف مسیر با زبان برنامه ریزی روبات
طرح ریزی مسیر با استفاده از مدل دینامیکی
طرح ریزی مسیرهای عاری از برخورد
فصل هشتم: مکانیزم بازوهای مکانیکی ماهر
مقدمه
طراحی بر پایه عملیات خواسته شده از روبات
پیکربندی سینماتیکی
معیارهای کمی مشخصات فضای کاری
سازه های زنجیری زاید و بسته
روش های کارانداز
سختی و تغییر شکل خمشی
حس مکان
حس نیرو
فصل نهم: کنترل خطی بازوهای مکانیکی ماهر
مقدمه
کنترل مدار بسته و پس خوراند (فید بک)
سیستم های خطی درجه دوم
کنترل سیستم های درجه دوم
تقسیم قانون کنترل
کنترل تعقیب مسیر
دفع اغتشاش
کنترل زمانی پیوسته و ناپیوسته (منقطع)
مدل سازی و کنترل یک مفصل تنها
ساختمان کنترل کننده یک روبات صنعتی
فصل دهم: کنترل غیر خطی بازوهای مکانیکی ماهر
مقدمه
سیستم های غیر خطی و متغیر با زمان
سیستم های کنترل چند ورودی چند خروجی
کنترل بازوهای مکانیکی ماهر
ملاحظات عملی
سیستم های کنترل روبات های صنعتی امروزی
تحلیل پایداری لیاپونوف
سیستم های کنترل مبتنی بر مختصات دکارتی
کنترل تطبیقی
فصل یازدهم: کنترل نیرو در بازوهای مکانیکی ماهر
مقدمه
کاربرد روبات های صنعتی در عملیات مونتاژ
چهارچوب اعمال کنترل در عملیات مقید شده جزئی
مسئله کنترل ترکیبی مکان نیرو
کنترل نیروی سیستم جرم فنر
روش های کنترل ترکیبی مکان نیرو
روش های کنترل روبات های صنعتی کنونی
فصل دوازدهم: سیستم ها و زبان های برنامه ریزی روبات
نویسنده : www.BartarFile.ir
تاریخ : شنبه 24 فروردين 1400
بر خلاف سیستم انتقال قدرت اتوماتیک، در سیستم انتقال قدرت با قابلیت تغییر پیوسته، جعبه دنده ای با تعداد مشخص چرخ دنده وجود ندارد، یعنی در CVT چرخ دنده های دندانه دار درگیر با هم وجود ندارند. رایج ترین نوع CVT بر اساس سیستم پولی کار می کند که اجازه ی بینهایت تغییر بین بالاترین و پایین ترین دنده بدون گسستگی را می دهد. اگر از اینکه چرا درباره ی CVT هم از واژه دنده استفاده می شود تعجب می کنید به خاطر بیاورید که منظور از دنده نسبت سرعت موتور به سرعت محور چرخ ها می باشد.
اگرچه CVT این نسبت را بدون استفاده از چرخ دنده های سیاره ای انجام می دهد اما باز هم از واژه دنده برای CVT استفاده می شود. بیشتر CVT ها فقط سه جزء اساسی دارند:
یک تسمه محکم فلزی یا لاستیکی
یک پولی متغییر محرک (ورودی)
یک پولی خروجی
به علاوه CVT ها انواع مختلفی از ریزپردازنده ها و حسگر ها را دارا می باشند، اما سه جزءی که در بالا توضیح داده شده اند اجزای اصلی اند که به این سیستم اجازه ی کار می دهند. پولی های با شعاع متغیر قلب CVT هستند، هر پولی از دو مخروط با زاویه راس ٢٠ درجه که رو در روی یکدیگر قرار دارند تشکیل شده است، تسمه ای در شیار بین دو مخروط قرار دارد، در صورت لاستیکی بودن تسمه ها از تسمه های V شکل استفاده می شود، تسمه های V شکل از آنجا نام خود را می گیرند که سطح مقطع V شکل دارند که اصطکاک تسمه با پولی را افزایش می دهد.
پروژه سیستم انتقال قدرت پیوسته (CVT)،در 24 اسلاید، با فرمت powerpoint و 9 صفحه با فرمت word به زبان فارسی، همراه با 5 فایل ویدیویی که نحوه کار و تاثیر سیستم انتقال قدرت CVT را نمایش می دهد و تصاویر و ذکر نکات مهم سیستم cvt به ترتیب زیر گردآوری شده است:
نویسنده : www.BartarFile.ir
تاریخ : دو شنبه 7 اسفند 1399
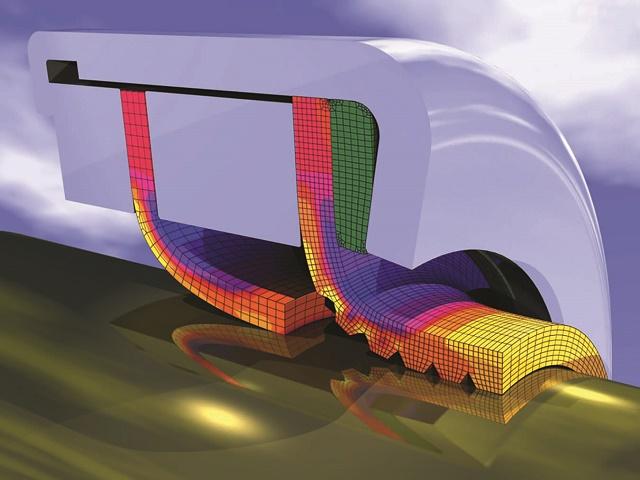
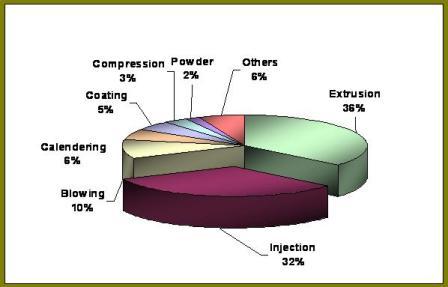
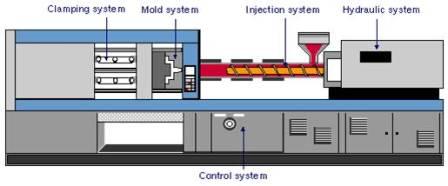
يكي از مهم ترين روش هاي رايج براي شكل دهي پلاستيكها، قالب گيري تزريقي ميباشد. امروزه خانه، خودرو، دفتركار و… حاوي انواع مختلفي از وسايل و قطعاتي است كه به روش قالب گيري تزريقي ساخته شده است. به عبارتي حدود 32% از كل پلاستيكهاي جهان با استفاده از روش تزريقي شكلدهي ميشوند. در شكل دهي پلي الفينها نيز روش قالب گيري تزريقي حدود 20% را به خود اختصاص ميدهد. فرآيند تزريق پلاستيک ها يکی از مهم ترين روش های شکل دهی مواد پليمری است. اين فرآيند قابليت توليد قطعات سه بعدی و پيچيده پلاستيک را در زمانی کوتاه دارا است. در اين فرآيند مواد اوليه پلاستيک از طريق يک دريچه مخروطی وارد سيلندر حرارتی شده و با دوران پيچ به جلو انتقال يافته و همزمان توسط گرم کننده ها و همچنين تنش برشی حاصل از دوران پيچ، نرم يا ذوب می گردد. در مرحله بعد، مواد انباشته شده در جلوی سيلندر با حرکت خطی پيچ به درون قالب تزريق می گردد...
پروژه فرآیند قالب گیری تزریقی (Injection Molding Process)مشتمل بر 4 فصل، 126 اسلاید، تایپ شده، به همراه تصاویر رنگی، با فرمت Powerpoint جهت دانلود قرار داده شده تا به راحتی کاربر بتواند آن را به میل خود در صورت نیاز ویرایش نماید و فصل بندی پروژه به ترتیب زیر می باشد:
نویسنده : www.BartarFile.ir
تاریخ : دو شنبه 6 اسفند 1399
آموزش نقشه کشی و نقشه خوانی مهندسی,یک منبع قوی برای یادگیری این درس مهم مهندسی می باشد. این آموزش با فرمت pdf، مشتمل بر 12 فصل، 676 صفحه، به زبان فارسی، تایپ شده، به همراه تصاویر رنگی توسط اساتید مجرب دانشکده مکانیک دانشگاه صنعتی اصفهان به ترتیب زیر گردآوری شده است:
فصل 1: تعريف نقشه، چگونگي ايجاد تصوير، انواع تصوير، رسم سه تصوير
فصل 2: اصل ارتباط بين تصاوير و كاربرد آن، رسم شش تصوير
فصل 3: اصول كلي نقشه خواني، مجهول يابي براي پروش قدرت تجسم
فصل 4: روش هاي آناليز سطح و حجم در شناخت و تجسم از روي تصاوير موجود
فصل 5: انواع تصاوير مجسم؛ تصاوير مجسم ايزومتريك قائم، ديمتريك قائم، ايزومتريك مايل و ديمتريك مايل
فصل 6: طريقه ترسيم تصاوير مجسم به روش جعبه اي و به روش محوري
فصل 7: رسم تصاوير دايره ها در تصاوير مجسم
فصل 8: برش و انواع آن (برش ساده، برش شكسته، برش شعاعي، نيم برش)، اصول برش و قواعد هاشور
فصل 9: آشنايي با برش هاي ديگر (برش موضعي، برش گردشي، برش گردشي جابجا، برش هاي خاص)، استثنائات برش
فصل 10: آشنايي كلي با نقشه هاي كارگاهي و مركب (مونتاژ)
فصل 11: اندازه نويسي نقشه هاي كارگاهي و نقشه هاي مركب
فصل 12: آشنايي كلي با تولرانس ها و انطباقات در نقشه هاي مركب
برتر فایل یک سایت مرجع با هدف انتشار تحقیق، مقاله، پایان نامه، پاورپوینت، جزوه، کتاب و همچنین فایل های آموزشی از نرم افزار پیشرفته CATIA در زمینه رشته مهندسی مکانیک است که به منظور دسترسی راحت تر، سریع تر و ارزان تر شما دانشجویان و پژوهشگران به تحقیقات مد نظرتان تاسیس شده است.










 آمار
وبلاگ:
آمار
وبلاگ: